実は、GPSキャディー グリーンオンに関して一番多いご質問の一つは、距離測定精度に関するものです。
第1章で述べましたように、距離測定誤差はGPSシステムによる現在位置の計算誤差と、予め記録しているゴルフ場の位置情報の誤差に起因します。
ここでは、GPSシステムによる現在位置の測定誤差について説明します。この測定誤差についてご理解いただくためには、現在位置の測定原理とGPS 衛星システムに関しての知識が必要ですので、先ず、2~6章をお読みください。
GPSシステムによる測定原理から分かるように、誤差要因は、GPS衛星位置の誤差とGPS衛星との距離測定誤差に大きく分けられます。
(1) GPS衛星位置誤差の要因
一般的なGPS受信機は、GPS衛星から受信した航法メッセージ(6章)に含まれているエフェメリスデータ(その衛星の詳細軌道情報)を利用します。このGPS軌道データは、GPS衛星システムを管制する監視局が衛星軌道の観測値に基づき作成しており、その精度は1m程度と言われています。データの更新は毎時行われます。更新から時間がたつと誤差も増えますから、2~3時間以内に利用する必要があります。
航法メッセージには、アルマナックデータ(全GPS衛星の概略軌道情報)も含まれています。こちらは数kmの誤差がありますが、受信機がGPS衛星の初期捕捉に利用することを目的としており、6日毎に更新されます。
尚、精密な位置測定を行う場合には、航法メッセージに含まれているエフェメリスデータより正確な、数日後に発表される、より正確な精密軌道暦を利用します。精密軌道暦は、IGSという国際機関が作成しており、精度は数mm~数cmと言われています。
(2) GPS衛星との距離測定誤差要因
GPS衛星との距離測定は2章で述べたように電波の到達時間で測定されます。誤差要因としては、
- 衛星に搭載されている時計の誤差
- 電波が電離層を通過する際に生じる時間遅れ
- 電波が対流圏を通過する際に生じる時間遅れ
- 直接GPS衛星から届く電波の他に、建物や地面に反射して届く電波(マルチパスと言う)によって生じる誤差
- 受信機の熱雑音や内部ノイズによる誤差
があります。
衛星の航法メッセージには、これらの誤差を小さくするための補正データが含まれています。例えば、衛星時計の補正データ、UTC(協定世界時)とGPS時刻間の補正データ、電離層遅延の補正データ等です(6章参照)。
GPSシステムでは、このように位置測定誤差を小さくするための様々な補正が行われていますが、それでも総合すると5m程度の誤差は残ります。誤差要因の中で一番大きいのは電離層の遅延による誤差です。電離層遅延量は、季節によっても変化し、1日の中でも変化します。太陽活動が激しい時期は電離層遅延量も大きく変化します。また、仰角の低い衛星は天頂近くの衛星より遅延量は大きくなります。次に大きいのは、衛星の軌道位置誤差や衛星時計の誤差です。
より正確な位置測定を実現するため、航法メッセージに含まれる補正に更なる補正も取り込む必要があります。この更なる補正については別の章で説明します。
(3) GPS衛星配置の影響
GPS衛星位置誤差や距離測定誤差が同じでも、その時に計算に使用しているGPS衛星の配置とGPS受信機の場所の相対関係で、GPS受信機の位置計算誤差は異なってきます。
不思議な感じがするかもしれませんが、下記の図を見てください。
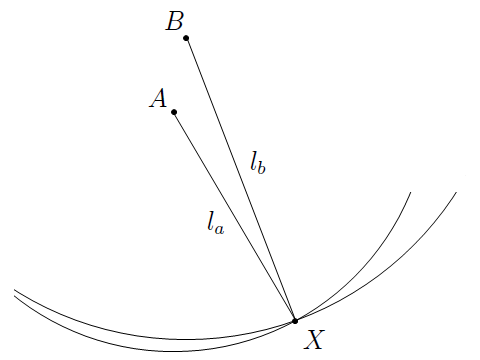
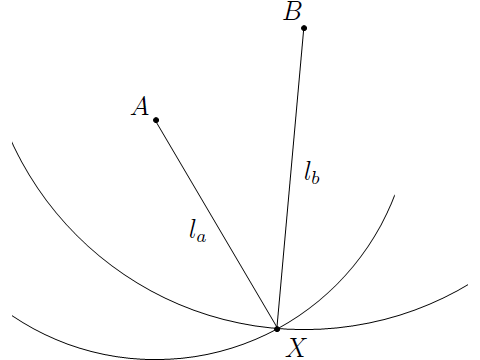
共に、





このように、測定点に対するGPS衛星の配置によって精度が低下する(曖昧度が増す)度合いをGDOP(Geometric Dilution Of Precision)、略してDOPと呼びます。この内、水平方向のDOPを取り出してHDOP(Horizontal)、また垂直方向のDOPを取り出してVDOP(Vertical) と呼びます。繰り返しになりますが、誤差要因が同じレベルでも、HDOPが大きいと水平方向の位置測定精度が悪くなります。5章で、GPSキャディー グリーンオンのGPSステータス画面の説明をしましたが、良い精度で位置決定するためには、GPS衛星の配置が天頂を中心に広がっているのが望ましいのです。GPSの位置計算をするチップ(LSI)は、毎秒毎に位置計算に用いたGPS衛星の配置からこれらのHDOPやVDOPを出力しています。