GPS受信機の時計に時刻のズレがあっても、正確に現在位置を知るためには、3次元座標で")


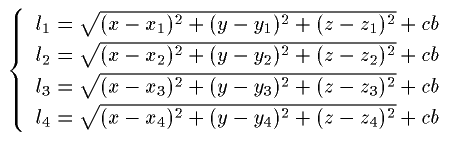
( は光速で、
は光速で、 は時刻バイアスによる距離誤差)
は時刻バイアスによる距離誤差)
は光速で、は時刻バイアスによる距離誤差)なんとなくGPSの位置測定原理が理解できた気になりませんか。ここまで述べたのは、数学的な原理ですが、実現には工学的な課題があります。
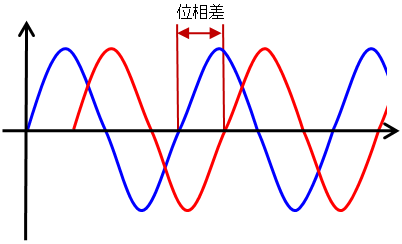
先ず、GPS衛星からの電波の到達時間の測定方法です。いくら高精度のストップウォッチを持っていても、ゴールの瞬間に正確にボタンを押せなければ正確な時間は測れません。電波は波ですから、到達した波は元の波に対して到達時間分波形がズレています。このズレ分(電波では位相差と呼ぶ)を測ることで時間を測っています。位相差の測定は、電波の周波数が高くなるほど正確になります。一方、余り周波数が高すぎると別の問題が出てきます。GPSでは、通常1.6GHz帯の周波数(正確には1.57542GHz)を使っています。FM放送の約0.1GHz(100MHz)よりは高く、衛星放送の12GHz帯よりは低い周波数です。波長は約19cmです。
位相差から距離を正確に計算するためには、実際にはもっと複雑な仕組み(変調方式)が組み込まれていますがここでは省略します。